Project Description

Toteutettiin simulaatiomalli liikkuvista viljelyalustoista
Kartoituksen avulla löydettiin toimivin ratkaisu
Luotiin mahdollisuus toteuttaa nostomekanismi ja automatisoida laitteisto
Little Garden
Little Garden viljelee versoja ja yrttejä vertikaalisesti sekä kehittää kokonaisvaltaisesti kaupunkiviljelyn liiketoimintamalleja ja teknologiaratkaisuja. Kasvit kasvavat useammassa päällekkäisessä linjastossa, pienellä pinta-alalla. Tehokkaat led-valaisimet ja kontrolloidut kasvuolosuhteet kasvattavat lehtivihanneksia energia-, vesi-, ja materiaalitehokkaasti vuoden ympäri.
Digital Twin teknologia avuksi uusien tuotantoratkaisujen suunnitteluun!
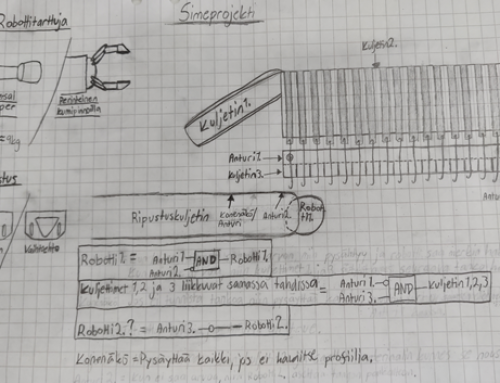
Innovaatioprojektin tarkoituksena oli perehtyä Digital Twin-teknologiaan. Projektin aiheena oli suunnitella virtuaalimaailmaan digitaalinen kopio toimivasta käyttöönotetusta robotista, jonka tehtävä on nostaa ja siirtää viljelyalustoja kerrosviljelylinjastossa. Siemens NX:llä simuloidaan viljelyalustojen liikettä. Tavoitteena luoda järkevä ja kustannustehokas keino viljelyalustojen siirtelyyn kerrosviljelylinjaston päissä. Onnistunut projekti antaisi vaihtoehdon vähentää raskasta nostotyötä ihmiseltä ja siirtää työ robotille ihmisen ohjaamana.
Projektin alkuperäisenä tavoitteena oli käyttää robottia viljelyalustojen nostamiseen ja luoda tästä täysi digitaalinen malli Visual Components –ohjelmaan, mutta tavoitteet muovautuivat projektin aikana. Työ toteutettiin kahden projektiryhmän ja yhden projektiassistentin voimin. Ensimmäinen ryhmä mallinsi ja toinen ryhmä lähti toteuttamaan nostinta. Projektin alussa kartoitettiin useita eri vaihtoehtoja robotti, cobotti, henkilönostin, pinoamisvaunu ja mekaaninen nostin. Kartoituksen aikana huomattiin pienen työtilan haasteet, sillä robotit olisivat vaatineet enemmän tilaa kuin kerrosviljelylinjaston päässä oleva1,5 m2 alue. Robotteja olisi myös tarvittu kaksi, mikä olisi tuplannut hinnan.
Mekaanisesti toteutettu vertikaalihissi-konsepti todettiin realistiseksi asiakkaan toiveet täyttäväksi ratkaisuksi, joka toimisi viljelyalustojen siirtelyyn linjaston päissä. Se on yksinkertaisin malli toteuttaa ja tilaergonominen sekä myös edullisin materiaaleiltaan. Toiminta perustuu askelmoottorilla ohjattuun hissiin, jonka tarttujat toimivat pneumaattisesti.
Projektissa lopputuloksena valmistui kerrosviljelylinjaston, viljelyalustan ja kahden erilaisen kasvin virtuaalimallit, osineen ja täysinä kokoonpanoina. Konseptista ensin luotiin 3D-mallit, joita on helppo kehittää eteenpäin. Keväällä 2020 projektia jatkettiin rakentamalla Digital Twin laitteisto 3D-mallin pohjalta ja suunniteltiin sille robottimekanismi kasvatusalustojen liikuttamiseen hyllyjen välillä. Nostomekanismin komponentit valittiin alustavasti.
Nostimen tarttujat
Mallinnustyön avulla suunniteltiin nostin
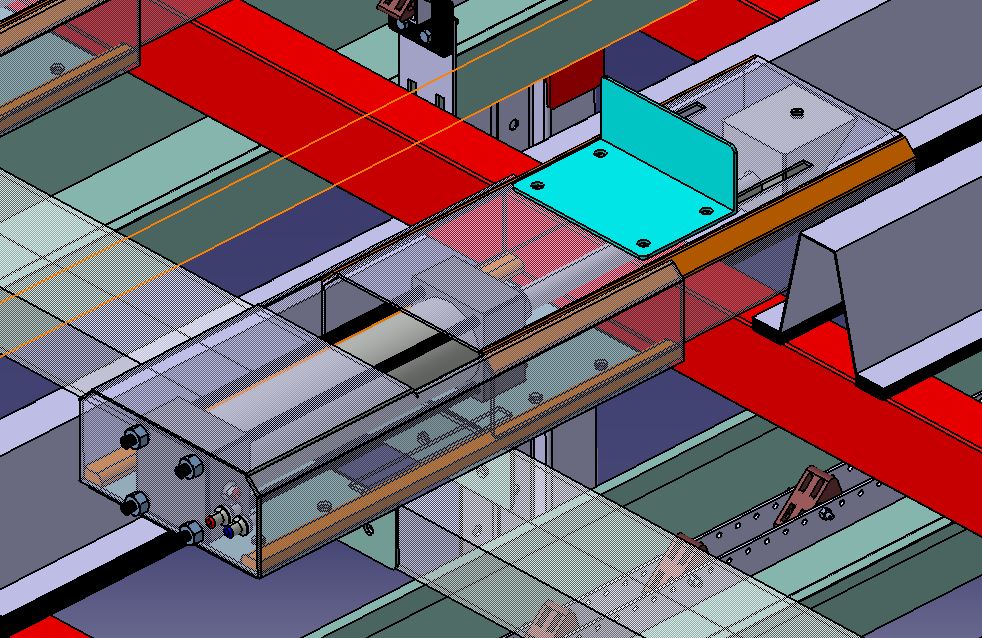
Projektia jatkettiin nostimen suunnittelulla. Catialla tehtävä mallinnustyön osuus oli projektissa erittäin suuri. Nostin koostuu viidestä pääosasta, joista tarttuja on täysin projektiryhmän itsenäisen suunnittelun tulos. Valmiita tarttujia ei suoraan kaupasta pysty ostamaan, vaan ne oli suunniteltava.
Projektissa toteutettiin simulaatiomalli liikkuvista viljelyalustoista kerrosviljelylinjastossa. Käyttöön valikoitui Siemens NX, sillä tämä ohjelma oli sekä tuttu että kevyeen simulointiin paras vaihtoehto. Nostimen simulaatio luotiin NX:n Mechatronics Consept Design -työkalulla ja Catialla rakennettu 3D-malli tuotiin ohjelmaan. Ensiksi määritettiin simulaatiossa mukana olevat kappaleet ja seuraavaksi määritettiin asema- ja nopeusohjeet, eli osien liikkeet. Lopuksi liikkeistä koottiin simulaatio Sequence Editorilla. Valmiina tuotteena saatiin video nostimen liikkeistä, josta voidaan nähdä nostimen toiminta.
Projektiassistentti viimeisteli digitaalisen kaksosen ja valitsi ohjausjärjestelmän laitteistolle. Hän hyödynsi Digitaalista kaksosta käyttöpaneelin suunnitteluun, jonka oli tarkoitus toimia muutamilla yksinkertaisilla painikkeilla.
Little Gardenin tulokset
Lopputuloksena saatiin linjastoautomaation osasto, hyvä mallinnus ja fyysinen prototyyppi rakennuttua, joista voisi jatkaa kehitystä. Kehitystyötä hankkeen parissa toteutettiin useampi kierros. Asiakas on tyytyväinen työnlaatuun, mutta totesi että tässä on paljon uutta, koska liikuttiin hänelle vieraalla maaperällä. Asiakkaalle jäi mahdollisuus rakentaa nostomekanismi oikeasti ja automatisoida laitteisto.