
UGV- roboteilla tehokkuutta varastoille
Projektin tavoitteena oli suunnitella ja demonstroida automatisoitua robotiikkaa sisälogistiikassa. Työ tehtiin Lovalille, jossa tällä hetkellä työntekijät kuljettavat tavaroita varastosta työpisteille. UGV-robotit pystyvät hoitamaan materiaalien ja osien liikuttelun ja vapauttavat työntekijät muihin tuotannon tehtäviin.
Projektissa kehitettiin ja tutkittiin tarkemmin UGV-robotti MiRiä, jolle annettiin Lovalin varaston pohjapiirroksesta pisteitä, joissa sen tulee liikkua. Tämä on uusi automaattinen ratkaisu, jolla robotti voi helposti viedä tavarat varastosta työpisteisiin ja palata takaisin alkupisteeseen hakemaan tavaroita.
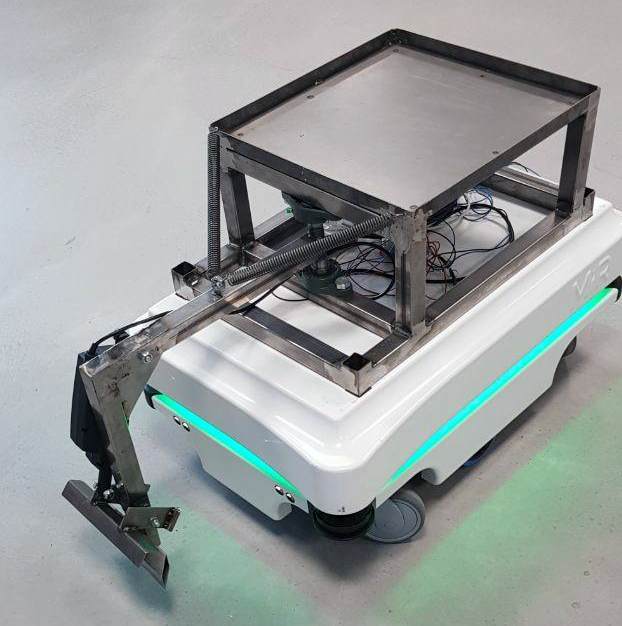
MiR 100:aan suunniteltiin runko, joka kiinnitetään robotin päälle ruuveilla. Runkoon tehtiin tarttuja perässä vedettäville tavaroille sekä taso päälle laitettaville tuotteille. Runko toimii siis MiRin vetokoukkuna ja tuotteiden alustana kuljetuksen aikana.
Vetokoukkua liikutetaan karamoottorin avulla, jolloin saadaan kiinnitettyä tuotteiden kuljetukseen tarkoitettu kärry. Toimilaitteeksi valittiin 24 VDC:llä toimiva karamoottori, koska se voidaan kytkeä MiRin sähköiseen järjestelmään. Karamoottoria ohjataan WISE-ohjelmalla, jonka kautta rullaratapöydän runko liikkuu automaattisesti.

Kirjoittajat
Rajin A. Wasso
Projektiassistentti
Mohamud Mahmoudi
Projektiassistentti
Rullakon päällä olevalle pöydälle voidaan laittaa kevyitä tavaroita. Rungon leuat on sorvattu vinoon, jotta tarttuja pystyisi liikkumaan paremmin. Pöydän runko on tehty alumiinista, jolloin se on kevyt mutta kestävä. Rungon kahden laakerin ansiosta tavarat liikkuvat helposti.
Moni miettii, miten turvallista on toimia robotin kanssa työpaikalla, varsinkin varastossa. Tässä kohtaa voidaan sanoa, että turvallisuus on varmistettu todella hyvin. MiR osaa pysähtyä, kun eteen tulee esteitä ja laskea uuden vaihtoehtoisen reitin, ellei este vaihda paikkaa.





