Project Description

Tavoitteena testausaseman automatisointi.
Hyödynnetään cobotiikkaa.
Lopputuloksena valmis simulaatiomalli uudesta testausasemasta.
Enics on kansainvälinen elektroniikkateollisuuden sopimusvalmistaja. Yritys muun muassa suunnittelee, kehittää ja valmistaa erilaisia elektronisia komponentteja. Enics Finland Oy:n tehdas sijaitsee Lohjalla.
Kobotiikan hyödyntäminen piirilevytestauksessa
Projektin tavoitteena oli automatisoida tällä hetkellä manuaalisesti toimiva piirilevyjen testausasema yhteistyörobotin eli kobotin (collaborative robot) avulla Enics Finland Oy:n tehtaalle. Tarkoituksena oli luoda simulaatio asiakkaan haluamasta kobottisolusta. Jos aika riittäisi niin kobottia oli tarkoitus testata myös käytännössä. Asiakas voisi käyttää simulaatiota käytännön toteutusta varten. Projekti rajautui lopulta vain simulaation tekemiseen ja testerin toiminnan automatisointiin.
Syksyllä 2020 kaksi ryhmää aloitti Robotiikka-kurssin harjoitustyönä. Ensimmäinen ryhmä teki selvityksen kobottityypeistä ja niiden teknisistä ominaisuuksista ja eroavaisuuksista ja toinen paneutui suoraan Enicsin projektiin kobottisolun Robot Studio -simulaatiomallin tekemiseen. Simulaatiota varten projektiryhmä sai asiakasyritykseltä SAT-tiedostona mallin testeristä ja kävi myös ABB:llä RobotStudio koulutuksessa.
Projektista saatiin niin sanottu selkeä ”proof of concept” simulaatiomallin avulla. Mallin avulla voidaan osoittaa, että linjasto on mahdollista rakentaa käytännössä. Suunnittelu ja testaaminen simulaation kautta vähentää virheiden määrää. Simulaation avulla tutkittiin YuMin soveltuvuutta makasiinin täyttämiseen ja korttien viemiseen testausasemalle. Selvitettiin myös eri kobottien soveltuvuutta testerin kannen avaamiseen.
Simulointia seuraamalla totesimme kobotin tarvittavien liikkeiden olevan erittäin niveliä kuluttavia. Kobotti käy ulottuvuutensa maksimietäisyydellä ja varsinkin tarroitusvaiheessa olevat liikkeet liikuttavat niveliä erittäin suurella kääntösäteellä. Tästä voi seurata turhan paljon huollon tarvetta ja suuriin lisäkustannuksiin. Projektissa jouduttiin kobotin kantokyvyn vuoksi toteuttamaan kahden käden liikkeitä levyaihioita liikuttaessa. Tämä rajoitti kobotin liikkumista ja ulottuvuutta erittäin paljon. Monipuolisten kahden käden synkronoitujen liikkeiden ohjelmoiminen on haastavaa. Tämä on todettu myös ABB:n koulutuksessa. Todettiin, että YuMin voima ei riittänyt kannen avaamiseen, vaikka ihminen työ tekee työn hyvinkin näppärästi.
Simulaatio YuMin käytöstä toteutettiin ABB:n RobotStudio-ohjelmalla, jossa robotteja ja kobotteja simuloidaan ja ohjelmoidaan offline-tilassa, eli se ei vaadi tuotannon pysäyttämistä tai tehtaassa paikallaoloa. Opiskelijat joutuivat kuitenkin käyttämään paljon aikaa Robots Studion käytön opiskeluun, mikä vaikutti huomattavasti projektin lopputulokseen.
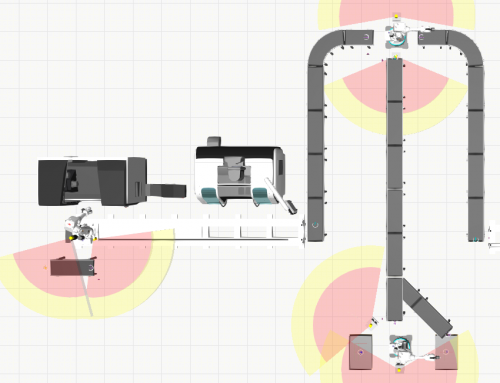
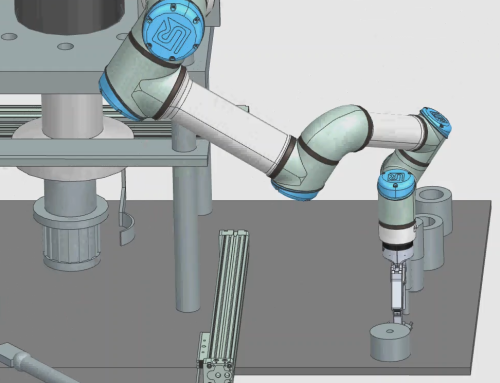
Uusia vaihtoehtoja simulaation avulla
Projektiassistentti teki simulaation kobotiikan käytöstä piirilevytestauksessa Visual Components ohjelmalla. Testauksen tuloksena voitiin todeta, että YuMi ei kyennyt suoriutumaan annetuista tehtävistä, sillä pyöritysliike ja testeri oli liian iso. Takaisinmaksuaika laskettiin ja todettiin, että UR3:een kannattaisi investoida, etenkin jos huomioidaan myös muu lisäkäyttö.
Saatiin kokonaisuudessaan hyvä käsitys markkinoilla olevista kobottityypeistä ja siten osaaminen näistä kehittyi myös projektitiimillä. Todettiin projektin vaatineen erityisen paljon opitun tiedon soveltamista ja uuden opiskelua.